Autonomous Race Car
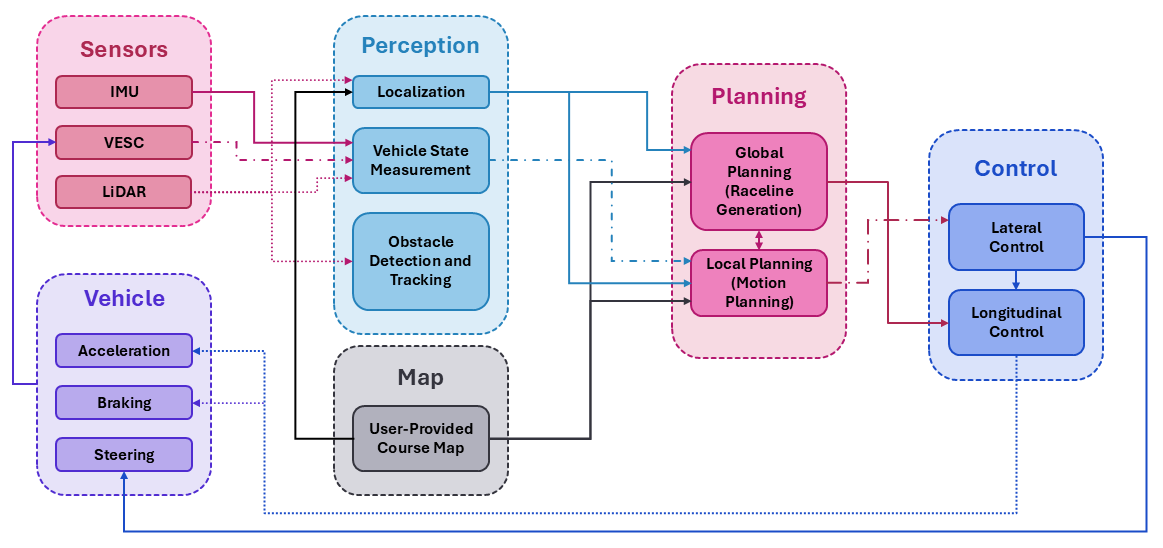
For my master’s thesis at UC Davis, I developed a scaled autonomous vehicle (AV) platform to supplement simulation-based research with live-test data. This work used open-source components to better facilitate research collaboration: the Roboracer 1/10 scale AV platform (formally F1tenth) for hardware and Robot Operating System 2 for Ubuntu 20.04 for software. The software was designed around a modular system architecture (see diagram) to improve tractability and transparency, allowing researchers to easily collaborate, verify, and validate the system.
Given the breadth of this goal, my thesis focuses on the design and validation of a novel sensor stack for vehicle localization that expands on the Roboracer platform. This stack uses an Inertial Measurement Unit (IMU) and a laser scanner to provide acceleration data and positional information, respectively. To mitigate sensor noise, data from these components are fused using an Extended Kalman Filter (EKF) with a kinematic bicycle model serving as a theoretical state estimator. This study analyzes the quality of the localization data produced using this approach by comparing filtered data with raw measurements.
YEAR: 2023-Present
ROLE: Engineer, Machinist, Programmer
STATE: Prototype
COLLABORATORS:
Prof. Shima Nazari
Mahdis Rabbani
Mohammad Abtahi
Jimmy Tran
MEDIA:
Article: Combining Design, Sustainability and Open-Source Innovation in Engineering